
Flight control system for professional UAVs.
Flight controller
Desarrollo del hardware y software de la controladora.
Comunication system
Integration of sensors, actuators, interfaces and power in a microprocessor system.
Design of a multirotor UAV
Prototype to validate the flight control system.
Company services
Aerial services with UAVs.
Flexible actuation system
various configurations of a UAV.
Technical goals
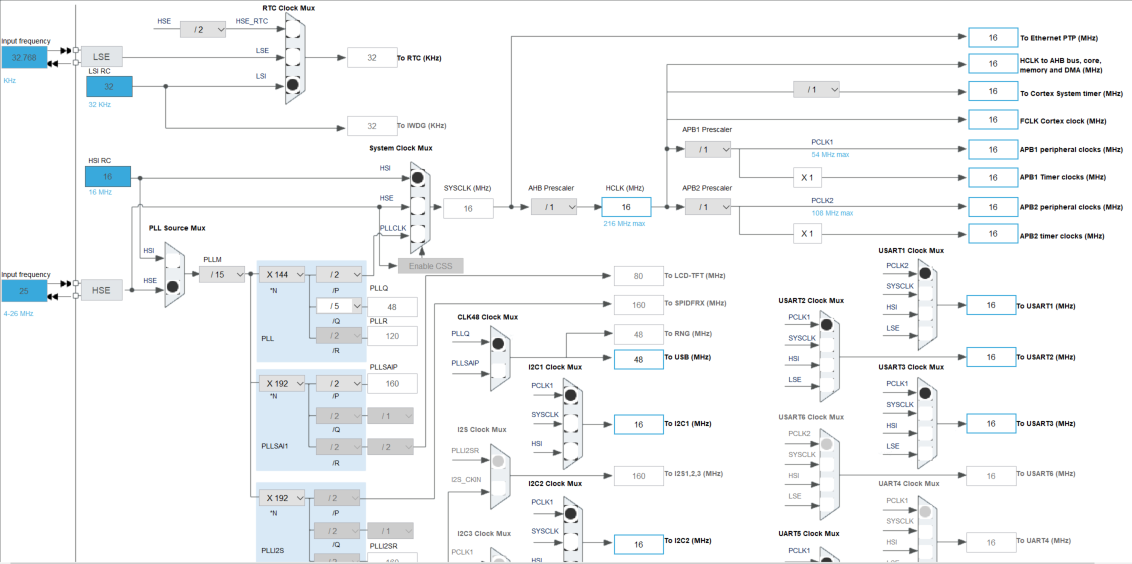
Flight Controller Hardware
It uses a microprocessor chip which is capable of executing the control program that moves the UAV. An inertial unit is added in order to measure orientation and acceleration. A unit of measure barometric pressure and height evaluates the flying height. It has a satellite navigation system. There is also a power management unit. Communication is established with the ground station through a radio control data link. UAV telemetry system sends data to the ground station.
Control software
The system works in real time using an "on-line" operation mode to register and modify system variables working in real time. This is the way to debugger and optimize de control system. Working the system "run" opeation mode the telemetry unit provides system information. The navigation system can develop fusion sensor working with minimum frequencies al 100Hz in order to ensure minimal drone location errors. A stabilization system is added to withstand wind perturbances. It includes an autonomous guidance system to apply the following flight moder to de drone: "loiter" de un sistema de guiado autónomo para aplicar al drone modos de vuelo "loiter", "navegation with beacon using relative coordenates", "navegation with beacon using absolute coordenates". The communication framework has been programmed using Mavlink protocol. And the system of operation with all the motors can work with different UAV configurations.
UAV multirotor
The multirotor structure is fault tolerant in case engine loss. It can achive 1.5 kg maximum load capacity working at most 25 minutes. Components can endure hardy enviroments. It has got a three-axis camera stabilizer in order to capture synchronized image and video that can be used in georeferencing.
Scalable hardware and software system
Modular programming.
Team members

Dr. Javier Rico Azagra

Dra. Montserrat Gil Martínez

Dr. Silvano Nájera Canal
Electrical Engineering Departament

D. Carlos Elvira Izurrategui
High precision, low cost and redundant inertial measurement unit
Position and orientation estimation based using mulple iertial measurements
Partners


Sensory fusion integrated into the control system
ensures small errors position and orientation of the UAV
Last news
01-02-2020
En breves días se manda el diseño de la placa impresa de controladora ...


Contact us
Here we are

Universidad de La Rioja
Escuela Técnica Superior de Ingeniería Industrial
Edificio Politécnico
26004 Logroño (La Rioja)
España
